Twój wynik: Modelowanie przestrzenne w lesnictwie
Twój wynik
Wszystkie ({{dataStorage.userResults.answersTotal}})
Prawidłowe ({{dataStorage.userResults.answersGood}})
Błędne ({{dataStorage.userResults.answersBad}})
Pytanie 1
Krzywa spektralna to:
przedstawia wartość odbicia promieniowania w danym zakresie długości fali
pozwala zaobserwować podobieństwa i różnice pomiędzy rożnymi klasami pokrycia terenu w danych zakresach długości
przedstawia wartość odbicia długości fali w zależności od współczynnika odbicia
Pytanie 2
W przypadku klasyfikacji nadzorowanej
wymagane wskazanie tzw. pól treningowych
nie jest wymagane wskazanie tzw. pol treningowych
wymagane jest wskazanie fragmentow obrazu stanowiących wzorce wydzielanych klas
Pytanie 3
Na podstawie krzywej spektralnej roślinności można stwierdzić, że odbicie w zakresie widzialnym
wynosi około
50-60%
85-95%
max 10%
Pytanie 4
Wymiar terenowy piksela dla kanałów multispektralnych zobrazowań pozyskanych przez sensor
ETM+ znajdujący się na satelicie Landsat 7 wynosi:
4
30
15
0,5
Pytanie 5
Rozdzielczość czasowa satelity to:
czas pomiędzy kolejnymi rejestracjami tego samego terenu
czas jaki upływa od wystrzelenia satelity do osiągnięcia pełnej operacyjności
czas przelotu satelity między biegunami
Pytanie 6
Wykres rozrzutu pikseli wskazanych jako pola treningowe
𝑚𝑜ż𝑒 𝑏𝑦ć 𝑔𝑒𝑛𝑒𝑟𝑜𝑤𝑎𝑛𝑦 𝑡𝑦𝑙𝑘𝑜 𝑑𝑙𝑎 𝑘𝑎𝑛𝑎łó𝑤 4(𝑁𝐼𝑅) 3(𝑅𝐸𝐷)
𝑚𝑜ż𝑒 𝑠ł𝑢ż𝑦ć 𝑗𝑎𝑘𝑜 𝑘𝑜𝑛𝑡𝑟𝑜𝑙𝑎 𝑝ó𝑙 𝑡𝑟𝑒𝑛𝑖𝑛𝑔𝑜𝑤𝑦𝑐ℎ 𝑝𝑜𝑑 𝑤𝑧𝑔𝑙ę𝑑𝑒𝑚 𝑖𝑐ℎ ℎ𝑜𝑚𝑜𝑔𝑒𝑛𝑖𝑐𝑧𝑛𝑜ś𝑐𝑖
𝑤𝑠𝑘𝑎𝑧𝑢𝑗𝑒 𝑛𝑎 𝑝𝑜𝑡𝑒𝑛𝑐𝑗𝑎ln𝑒 𝑡𝑟𝑢𝑑𝑛𝑜ś𝑐𝑖 𝑤 𝑟𝑜𝑧𝑟𝑜ż𝑛𝑖𝑒𝑛𝑖𝑢 𝑛𝑖𝑒𝑘𝑡ó𝑟𝑦𝑐ℎ 𝑘𝑙𝑎𝑠(𝑛𝑝.𝑔𝑙𝑒𝑏𝑎)
Pytanie 7
Kompozycja barwna z kanałów 4, 3 i 2 pozyskanych przez sensor ETM+ satelity Landsat
𝑤𝑦𝑘𝑜𝑟𝑧𝑦𝑠𝑡𝑢𝑗𝑒 𝑘𝑎𝑛𝑎ł 𝑝𝑜𝑑𝑐𝑧𝑒𝑟𝑤𝑜𝑛𝑦 (𝑁𝐼𝑅)
𝑤𝑦𝑘𝑜𝑟𝑧𝑦𝑠𝑡𝑢𝑗𝑒 𝑘𝑎𝑛𝑎ł 𝑛𝑖𝑒𝑏𝑖𝑒𝑠𝑘i
wykorzystuje kanał czerwony
Pytanie 8
Pola treningowe
mogą składać się z jednego lub większej ilości pikseli
mogą być wyznaczane automatycznie
powinny reprezentować charakterystyczny dla danej klasy fragment zobrazowania
Pytanie 9
Na podstawie krzywej spektralnej roślinności można stwierdzić, że odbicie w zakresie bliskiej
podczerwieni wynosi około:
max 10%
85-95%
50-60%
Pytanie 10
Kanał panchromatyczny:
to jeden z kanałów spektralnych w którym rejestrowany jest szerszy zakres promieniowania niż np. w kanałach zielonym lub czerwonym
w przypadku sensora ETM+ satelity Landsat charakteryzuje się mniejszym rozmiarem piksela
ze względu na większą rozdzielczość radiometryczną może być wykorzystany w kompozycji barwnej CIR
Pytanie 11
Generowanie kompozycji barwnych:
ułatwia interpretacje informacji zawartych w zobrazowaniu
polega na rozdzieleniu informacji zawartych w jednym z kanałow spektralnych na poszczegolne kolory składowe (czerwony, zielony, niebieski)
polega na wyświetleniu informacji zwartych w poszczegolnych kanalach spektralnych w ustalonych kolorach składowych (czerwony, zielony, niebieski)
Pytanie 12
Klasami pokrycia terenu, które stosunkowo łatwo jest odróżnić są:
zabudowa i las iglasty
roslinnośc niska i woda
roślinność niska i las iglasty
zabudowa i odkryta gleba
Pytanie 13
Kompozycja barwna złożona z kanałów 432 w porównaniu do kompozycji z kanałów 321:
pozwala na latwiejsze rozrożnienie poszczegolnych klas roślinności
pozwala na prostsze szacowanie wysokości obiektów
pozwala na określenie kondycji zdrowotnej roślinności
Pytanie 14
Rozdzielczość radiometryczna 8 bitowa pozwala zapisać
256 kolorow (2 do potęgi 8)
16777216 kolorow (8 do potęgi 8)
64 kolorow (8 do potęgi 2)
Pytanie 15
Zakres bliskiej podczerwieni odpowiada długości fali z zakresu:
700-1000nm
900-1500nm
600-700nm
Pytanie 16
16. Klasyfikacja obrazów satelitarnych:
może zastąpić manualna wektoryzacje granic klas pokrycia terenu
dzieli się na nadzorowaną i nienadzorowaną
jest procesem opartym o cechy spektralne obrazu
Pytanie 17
Zamieszczony fragment zobrazowania satelitarnego
jest kombinacją 3 kanałów spektralnych z zakresu poniżej 700 nm
przedstawia odbicie fal od roślinności w zakresie bliskiej podczerwieni
charakteryzuje się wielkością piksela ok 30x30m

Pytanie 18
W oprogramowaniu ArcGIS możliwe jest obliczenie spadku terenu dla każdego piksela w:
radianach
procentach
stopniach
Pytanie 19
Dla NMT utworzonych w ramach projektu ISOK błąd średni wysokości zawiera się w przedziale:
0-0,1m
0-0,6m
0-0,2 m
Pytanie 20
Numeryczny Model Terenu utworzony w ramach projektu ISOK charakteryzuje się rozdzielczością przestrzenną:
2m
0,5m
1m
Pytanie 21
Warstwę rastrowa reprezentującą ekspozycje terenu można w oprogramowaniu ArcGIS utworzyć
na podstawie modelu:
Hillshade
zNMPT
NMT
NMPT
Pytanie 22
W celu otrzymania warstwy rastrowej reprezentującej spadek terenu w klasach 10 stopniowych
należałoby w oprogramowaniu ArcGIS użyć narzędzi:
slope, zonal statistics
aspect, zonal statistics
slope, reclassity
Pytanie 23
Funkcja “zonal statistics as table”:
dziala w oparciu o dwie warstwy: rastrowa I wektorową
pozwala na przypisanie wartości z poszczególnych pikseli warstwy rastrowej do poszczególnych punktów linii lub poligonów warstwy wektorowej
pozwala na przypisanie wartości z poszczególnych poligonów warstwy wektorowej każdemu z pikseli warstwy rastrowej
Pytanie 24
Klasyfikacja obrazów satelitarnych:
może zastąpić manualną wektoryzacje klas pokrycia terenu
moze być przeprowadzona tylko na kompozycjach barwnych CIR
umozliwia wyznaczenie granic zbiornikow wodnych
Pytanie 25
Jaki błąd wysokości występuje na ternie Krynicy:
1m
0,5m
1,5m
Pytanie 26
Jaki podkład będzie najlepszy do sporządzenia mapy widoczności terenu pod budowę wież:
NMT
zNMPT
NMPT
Pytanie 27
Ile kanałów spektralnych rejestruje Sentinnel 2:
10
8
13
Pytanie 28
Jaką rozdzielczość przestrzenną posiada Sentinnel 2:
60m
10m
20m
Pytanie 29
Jaką rozdzielczość przestrzenną posiada model NMT ISOK:
1x1m
30x30m
15x15m
Pytanie 30
Jaką rozdzielczość przestrzenną posiada model NMT SRTM:
30x30m
15x15m
1x1m
Pytanie 31
Jaką rozdzielczość przestrzenną posiada model NMT ASTER:
15x15m
30x30m
1x1m
Pytanie 32
RGB- jakim jest typem przekształcenia:
classifed
Kanał 2 - Green, Kanał 3 - Red, Kanał 5 – NIR
addytywne (Kanał 1- Blue, Kanał 2 – Green, Kanał 3 – Red)
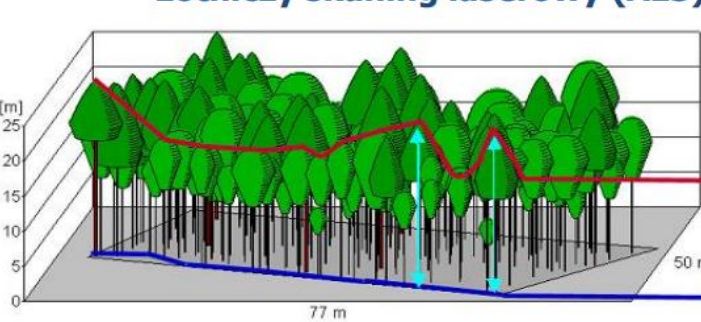
Pytanie 33
Niebieska linia na schemacie to:
nmpt
atm
nmt
dtm
Pytanie 34
Satelita AISA - ile ma kanałów?
255
184
355
Pytanie 35
Co daje największy błąd ?
ALS-FOTO
ALS – SILP
FOTO-SILP
Pytanie 36
Pierwsze mapy z tłem - kiedy powstały?
1845 Paryż
1786 Berlin
1668 Zurich
1903 Londyn
Pytanie 37
Triangulacja Delaunay:
to taki podział obszaru na trójkąty, gdzie każde koło opisane na trzech sąsiadujących ze sobą punktach z tesalacji Voronoi nie zawiera żadnego innego punktu
opisuje zmiany gradientu potencjału i ma bardzo istotne znaczenie w analizach zmian prędkości procesów erozji oraz akumulacji
jest podstawowym źródłem danych do modelowania hydrologicznego, stąd jakość modelu wpływa istotnie na uzyskane wyniki
to podział obszaru na kwadraty, gdzie każdy kwadrat składa się zwykle z trzech subpikseli, emitujących światło w kolorach czerwonym, zielonym i niebieskim (RGB)
Pytanie 38
Co to są Linie nieciągłości?
wzniesienia, nasypy, rzeki
wiadukty, urwiska
linie zabudowy
skarpy, rowy
szlaki komunikacyjne itp
Pytanie 39
Model DTED:
to każda cyfrowa reprezentacja przestrzennego reliefu mającego charakter zmiennej ciągłej
polega na obrazowaniu powierzchni terenu w zakresie mikrofalowym z pułapu lotniczego lub satelitarnego
rozdzielczość terenowa piksela = DTED-1 3 x 3”, DTED-2 1 x 1” dokładność wysokościowa bezwzględna = 16, dokładność wysokościowa względna = 10, dokładność horyzontalna względna = 20m
to numeryczna reprezentacja powierzchni terenowej, utworzona zazwyczaj przez zbiór odpowiednio wybranych punktów (XYZ) tej powierzchni oraz algorytmy interpolacyjne umożliwiające odtworzenie jej kształtu w określonym obszarze
Pytanie 40
Co wchodzi w skład SRTM:
ASTER Global DEM + IDET 2
ITED1 + ITED3, (jest dokładniejszy niż Aster - mniej szumów)
ITED1 + ITED2, (jest dokładniejszy niż Aster - mniej szumów)
Pytanie 41
Co to jest CHM?
Model koron drzew
zgromadzenie zharmonizowanych informacji o stanie środowiska geografcznego w zakresie priorytetowych tematów dla wszystkich krajów Wspólnoty
inwentaryzacja biotopów
Surfaces Canopy zwarcie koron drzew, penetracja okapu przez promienie słoneczne
kartowanie pokrycia terenu / użytkowania ziemi
Pytanie 42
Pit flling:
podnoszenie wysokości komórek rastra w obszarach wgłębień
otwarty format metadanych
powstałe w wyniku reklasyfkacji nowe podzbiory o określonych wartościach
liczba pikseli reprezentująca daną wartość
Pytanie 43
Co to jest okno optyczne?
część okna atmosferycznego ; fale dl 330 – 1100 nanometrów
w zakresach fal słabo pochłanianych przez atmosferę możliwa jest obserwacja powierzchni Ziemi z kosmosu
- okno atmosferyczne; fale dl130 - 2575 nanometrów
zakres spektralny promieniowania elektromagnetycznego słabo pochłaniany przez atmosferę
Pytanie 44
NVID:
znormalizowany wskaźnik widoczności (NIR – RED)/(NIR+RED) = (4-3)/(4+3)
znormalizowany wskaźnik wegetacji (NIR – RED)/(NIR+RED) = (4-3)/(4+3)
znormalizowany wskaźnik wysokości (NIR – RED)/(NIR+RED) = (4-3)/(4+3)
Pytanie 45
Satelity bardzo wysokorozdzielcze (VHRS):
wielkość piksela mniejsza 1cm
-wielkość piksela mniejsza 10cm
wielkość piksela mniejsza 1m
wielkość piksela większa 1m
Pytanie 46
UAV to:
podstawowe statki powietrzne
załogowe statki powietrzne
bezzałogowe statki powietrzne
Pytanie 47
Ile wynosi błąd NMT przy wys. zdjęcia 4000m?
0,8-1,4 m mNMT = (0,2-0,3)‰ Wfot
0,8-1,2 m mNMT = (0,2-0,3)‰Wfot
0,3-1,4 m mNMT = (0,2-0,3)‰ Wfot
0,1-1,2 m mNMT = (0,2-0,3)‰ Wfot
Pytanie 48
Poziomicowy/warstwicowy nieregularny model powstał w:
XIX w. Zurich
XVIII w. Alpy Szwajcaria
XIX w. Alpy Szwajcaria
XVIII w. Zurich
Pytanie 49
Co to jest Focal Statistic?
Funkcje strefy
do określania statystyk dla podzbiorów komórek dowolnej mapy rastrowej. Dla wartości Integer liczone są wszystkie statystyki a dla Real nie są określana: najrzadsza, najczęstsza oraz różnorodność).
ruchome okno, Każdy piksel nowo powstającego rastra otrzymuje wartość statystyki (np. średnią). Ruchome okno ma często wymiar 3x3, 5x5, 7x7 lub 9x9 pikseli. Okno może być okręgiem. Bardzo często wykorzystywane w budowie różnych fltrów stosowanych w przetwarzaniu obrazu bądź w kompresji obrazu.
Funkcje sąsiedztwa
Pytanie 50
Co to jest Zonal statistic?
do określania statystyk dla podzbiorów komórek dowolnej mapy rastrowej. Dla wartości Integer liczone są wszystkie statystyki a dla Real nie są określana: najrzadsza, najczęstsza oraz różnorodność)
ruchome okno, Każdy piksel nowo powstającego rastra otrzymuje wartość statystyki (np. średnią). Ruchome okno ma często wymiar 3x3, 5x5, 7x7 lub 9x9 pikseli. Okno może być okręgiem. Bardzo często wykorzystywane w budowie różnych fltrów stosowanych w przetwarzaniu obrazu bądź w kompresji obrazu.
Funkcje sąsiedztwa
Funkcje strefy
Pytanie 51
Atrybuty topograficzne podstawowe to:
Nachylenie
Ekspozycja
Struktura, Charakterystyka terenu
Krzywizna zbocza
Pytanie 52
Atrybuty topograficzne wtórne to:
SPI
LS
Ekspozycja
TWI
Spadek, Krzywizna zbocza
Pytanie 53
Co to jest synteza addytywna?
specyfkacja OGC defniująca interfejsy dla dostępu do danych i operacji, jakie można wykonywać na obiektach geografcznych
zjawisko mieszania barw poprzez sumowanie wiązek światła widzialnego różnych długości.
manualna digitalizacja bądź wektoryzacja ekranowa zeskanowanych obrazów analogowych map warstwicowych, pikiet wysokościowych innych linii strukturalnych
pozwala na pobieranie i wykonywanie operacji na danych zakodowanych w GML, dostępnych na serwerach typu Web
Pytanie 54
Co to jest JERS ?
program
bezzałogowy obiekt latający
radar
satelita
Pytanie 55
Jaka ma rozdzielczość NOAA?
niskorozdzielczy 1,1 m
wysokorozdzielczy 1,1 m
średniorozdzielczy 10,1 m
niskorozdzielczy 1,1 km
Pytanie 56
W jakim czasie RAPIDEye okrąża ziemię?
1 dzień
miesiąc
tydzień
2 tygodnie
Pytanie 57
Z ilu satelitów składa się system RapidEye?
3 TACHYS (Rapid), MATI (Eye), CHOMA (Earth)
4 CHOMA (Earth), CHOROS (Space),TROCHIA (Orbit),TACHYS (Rapid)
1 TACHYS (Rapid)
2 CHOROS (Space) oraz TROCHIA (Orbit)
5 TACHYS (Rapid), MATI (Eye), CHOMA (Earth), CHOROS (Space) oraz TROCHIA (Orbit)
Pytanie 58
SRTM jaką ma rozdzielczość nad Polską?
90x90
50x90
60x100
40x80
Pytanie 59
16 bitów ile to kolorów?
2^16 kolorów
65536 kolorów
2^8 kolorów
256 kolorów
16.7 mln kolorów
Pytanie 60
Jakie są typy metadanych?
rozpoznania
Wyszukiwania
stosowania
Analizowania i konfgurowania
Pytanie 61
Co to jest WFS?
Indeks siły spływu
specyfkacja OGC defniująca interfejsy dla dostępu do danych i operacji, jakie można wykonywać na obiektach geografcznych. Pozwala na pobieranie i wykonywanie operacji na danych zakodowanych w GML, dostępnych na serwerach typu Web Feature. Usługa opiera się na protokole http
podział obszaru na trójkąty, gdzie każde koło opisane na trzech sąsiadujących ze sobą punktach z tesalacji Voronoi nie zawiera żadnego innego punktu
Topograficzny indeks wilgotności
Pytanie 62
ALS:
Zaniża wysokość d-stanu
100% punktów zatrzymuje się na koronach
Zawyża wysokość d-stanu
Pytanie 63
Aster Global Dem ma rozdzielczość:
30
20
10
Pytanie 64
Satelita przelatujący nad lodowcami i lasami Ameryk to:
RapidEye
ICE-sat
Landsat 7
Pytanie 65
Podczas tworzenia NMT co jest przydatne do wypełniania zagłębień?
pit flling
fow direction
carving
interpolacja
Pytanie 66
Carving:
wypełnianie zagłębień
satelita
obniżanie całej okolicznej powierzchni aż do zaniku wgłębiania
Pytanie 67
Różnica pomiędzy WFS a WMS:
obie odpowiedzi są prawidłowe
WMS - GIF, JPEG, PNG; WFS - GML
WMS – Web Map Serivce - udostępnianie przez serwer map. Mapy te są obrazowane na podstawie danych geografcznych zawartych w bazie.Specyfkacja OGC defniująca interfejsy dla dostępu do danych i geografcznych. Pozwala na pobieranie i wykonywanie operacji, jakie można wykonywać na obiektach operacji na danych zakodowanych w GML, dostępnych na serwerach typu Web Feature. Usługa opiera się na protokole http.
Pytanie 68
Co to jest VAT?
otwarty format metadanych, umożliwiający dodawanie informacji geograficznych do plików w formacie TIFF.
biblioteka służąca do odczytu i zapisu rastrowych danych geoprzestrzennych
tabela atrybutowa w gridzie
valueat tribute table
Pytanie 69
Systemy MMS (Mobile Mapping System) składają się z:
QuickBird, IKONOS-2, SPOT, GeoEye1 i inne VHRS;
TerraSAR-X; TanDEM X, ALOS PRISM
TLS + kamery fotogrametryczne lub video + GPS + INS + odometr (na kole samochodu – odległość)
Pytanie 70
Hillshade to:
modele wysokościowe oparte na danych cyfrowych VMap (Vector Smart Map
modele NMT opracowane na podstawie zdjęć fotogrametrycznych LPIS generowane są w regularnej siatce
cieniowany NMT
DTM na podstawie odfiltrowanej chmury punktów ALS
Pytanie 71
W których satelitach jest kanał Red Edge:
BlackBridge (RapidEye)
Pleiades Neo
LIDAR
QuickBird
GeoEye
SENTINEL -2
TerraSAR-X
WorldView-2
Pytanie 72
SRTM to misja promu kosmicznego której rezultatem jest numeryczny model terenu, który:
umieszczony na orbicie 09.2012 roku (GSD 1.5 m PAN, 6 m MS)
pokrywa obszar lądów znajdujących się pomiędzy 56 stopni szerokości geograficznej południowej a 60 stopni północnej
podwieszono pod balonem stratosferycznym a sygnał nanosatelity był potwierdzany przez radioamatorów na całym świecie
Pytanie 73
Stała kamery wynosi 152 mm, wysokość fotografowania 1520 m, mianownik skali zdjęcia to:
100
10 000
1 000
100 000
Pytanie 74
System pozyskania danych, zaliczany do metod aktywnych którego rezultatem jest chmura punktów:
ICEsad
GRID Esri
LIDAR
QuickBird
Pytanie 75
Lotniczy skaning laserowy pozwala:
na utworzenie dokładnego NMT
numeryczną reprezentacje powierzchni terenowej
określić wysokość drzew drzewostanu
niwelację terenu
Pytanie 76
Co to jest Cubic convalent?
interpolacja jasności
interpolacja dwuliniowa
interpolacja dwukubiczna (bikubiczna, splot sześcienny,
Pytanie 77
Satelity bardzo wysokorozdzielcze (VHRS):
IKONOS, GeoEye-1, OrbView3
WorldView-2, Pleiades
QuickBird, WorldView-1
Pytanie 78
Metoda równoległościanów (ang. Box classifer lub Parallelepiped method):
nieparametryczna reguła decyzyjna przynależności piksela do klasy, posiada cechy klasyfkacji zgrubnej, mająca głównie zastosowanie w analizach wstępnych dla reguł o większym stopniu Klasyfkacja obrazu skomplikowania i czasochłonności. Klasy obiektów muszą wyraźnie różnić się od siebie
na podstawie dwóch lub większej liczby map rastrowych tworzy sie nowy raster
funkacja, która polega na utworzeniu tabeli atrybutowej w której znajduje się kolumna z numerami stref i pola do wszytkich obliczeń staystycznych
Pytanie 79
Funkcja crosstabulacji:
Funkcja oblicza wybraną statystykę ze zbioru map rastrowych (Ras1; Ras2; Ras3… ) W wyniku analizy powstaje raster wynikowy o reprezentujący daną statystykę.
na podstawie dwóch lub większej liczby map rastrowych tworzy sie nowy raster
funkcja powoduje przypisanie pikselom nowej wartości (najczęściej całkowitej, Integer). Funkcja najczęściej znajduje zastosowanie przy mapach tematycznych, na których występują klasy (np. zagrożenia pożarowego) o określonym zasięgu wartości atrybutu
Pytanie 80
Chwilowe pole widzenia (IFOV) to:
powierzchnia jaką widzi w danym momencie pojedynczy detektor skanera. IFOV niekoniecznie musi odpowiadać powierzchni piksela.
liczba rozróżnialnych poziomów promieniowania tj. liczby bitów na jaki podzielono rejestrowaną energię.
liczba kanałów na jakie podzielono zakres promieniowania EM
Pytanie 81
Do określania NMPT używamy danych pozyskanych z:
LiDAR
CHM
DSM
Pytanie 82
Podstawowe założenia dyrektywy INSPIRE:
Dane powinny być pozyskiwane wielokrotnie
Dostęp do informacji o tym, jakie dane przestrzenne są dostępne i na jakich warunkach, a także informacja umożliwiająca użytkownikowi ocenę przydatności tych danych do swoich celów.
Dane pozyskiwane tylko jeden raz
Należy zapewnić ciągłość przestrzenną danych
Dane nie powinny być powszechnie dostępne
Dane przechowywane na odpowiednim (jednym) poziomie administracji
Dane powinny być powszechnie dostępne
Pytanie 83
Satelita z systemu Planet Dove zaliczyć można do grupy:
średnich satelitów o wadze około 30 kg
nanosatelitów o wadze <5kg
ciężkich 4 tonowych satelitów
Pytanie 84
Satelity SENTINEL-2 A oraz SENTINEL 2B:
to satelity NASA i posiadają system radarowy aktywny
to satelity ESA I posiadają system radarowy aktywny
to satelity ESA i posiadają pasywny system optyczny
Pytanie 85
Z czym kojarzy Ci się pojęcie HAPS które pozyskują obrazy z zakresu Earth Observation?
to coś pomiędzy satelitą a dronem
to bezzałogowe statki latające
latają na wysokości 20-50k dzięki panelom słonecznym
Pytanie 86
Satelity systemu Planet Dove tworzą konstelację:
ponad 140 satelitów
5 satelitów
50 satelitów
Pytanie 87
Satelita LANDSAT 8 charakteryzuje się:
rozpoczął obrazowanie w zasadzie wiosną 2013 roku
obecnością Operational Land Imager
rejestracją w 9 kanałach (OLI)
Pytanie 88
Satelita izraelski EROS-B dostarcza zobrazowań charakteryzujących się:
rozdzielczość radiometryczna 10 bit
szerokość sceny do 7km
rozdzielczość kanału PAN= 0,7m
Pytanie 89
Orbita satelitarna LEO:
znajduje się na około 36 000 km od równika
to jeden z pierścieni Jowisza
znajduje się na wysokości około 500-800 km od powierzchni ziemi
Pytanie 90
Satelity SENTINEL-2 A oraz SENTINEL 2B:
to satelity NASA I posiadają system pasywny
dzięki nim można pozyskać dane w nocy i podczas pełnego zaćmienia
to satelity ESA i posiadają system radarowy aktywny
Pytanie 91
91. Satelita ICESat2 (NASA) charakteryzuje się sensorami:
jest instrumentem typu SLS- czyli Lidar pracującym z pułapu orbity dokonującego pomiarów wysokości obiektów na powierzchni Ziemi (wysyłanie i odbieranie wiązki lasera)
do pomiaru pola grawimetrycznego Ziemi
do obserwacji Drogi Mlecznej
Pytanie 92
W roku 2011 planowano i zrealizowano umieszczenie na orbicie Ziemi satelitę z serii:
TerraSAR-X (Niemcy)
LANDSAT MSS
Pleiades (Francja)
Pytanie 93
System GEDI (NASA) przycumowany do Międzynarodowej Stacji Kosmicznej (IIS) będzie
następne miesiące pozyskiwać informacje:
dokonywać pomiaru temperatury oceanów w stopniach Celsjusza
wysyłać wiązki lasera (Lidar) służące m.in. określaniu wysokości lasów i roślinności na różnych kontynentach
o promieniowaniu kosmicznym zagrażającym Ziemi
Pytanie 94
Sensory satelity Pleiades HR 1 wystrzelony w grudniu 2011 charakteryzują się:
rozdzielczością kanału PAN = 5,0 m (GSD)
rozdzielczością terenową kanału PAN = 0,5 m (GSD)
rozdzielczością kanału MS = 2,0 m (GSD)
Pytanie 95
Określenie "okno optyczne":
to zakresy długości fal radiowych z zakresu 30cm do 30km
Jedno z okien atmosferycznych
właściwość atmosfery przepuszczająca zakres promieniowania światła białego i NIR
Pytanie 96
Stereomatching:
może częściowo zastąpić skaning laserowy dla obiektów oświetlonych dostarczając przy okazji informacji radiometrycznej ze zdjęcia lotniczego, jednak dla obszarów leśnych istnieje problem generowania punktów na dnie drzewostanu
pozwala w trybie 3D oglądać przestrzennie zdjęcia lotnicze
Pozwala automatycznie generować punkty pomiarowe w obiektach 3D na podstawie autokorelacji pikseli obrazu na dwóch sąsiednich zdjęciach lotniczych stanowiących stereogram
Pytanie 97
Technologia MLS wykorzystuje:
dometr oraz IMU aby zachować możliwości zapisu trajektorii podczas przejazdu platformy np. przez garaż podziemny
pomiar pola grawitacyjnego celem określenia wielkości i odległości pomiędzy obiektami
skaner (lub większą ich ilość), odbiornik GNSS jednostkę IMU oraz odometr zamontowane i zintegrowane na ruchomej platformie
Pytanie 98
Ważnym etapem przygotowania NMT do analiz hydrologicznych przeprowadza się z wykorzystaniem algorytmu:
Hillshade
aspect&slope
pit fling
Pytanie 99
Zjawisko skupiania się wody w cieki I potoki, spływającej po krzywiźnie planarnej stoku nosi
nazwę:
konwergencji
dywergencji
sinks
Pytanie 100
Poprawa jakości wyświetlania (optymalizacja kontrastu) obrazu satelitarnego nosi nazwę:
przepróbkowanie (what?)
resampling
histogram equalization & linear stretching
Pytanie 101
Cubic convolution:
metoda splotu sześciennego analizująca 16 pikseli sąsiednich
metoda generowania obiektów 3D z danych ALS
jedna z metod resamplingu obrazu
Pytanie 102
Metoda klasyfikacji, która nie musi korzystać z pól treningowych i może odbywać się automatycznie to tzw.:
Klasyfikacja pikselowa
Analiza OBIA
Klasyfikacja typu IOSCLASS
Pytanie 103
Numeryczny znormalizowany Numeryczny Model Powierzchni Terenu wykonuje się poprzez:
Stereodigitalizację modelu na fotogrametrycznej stacji cyfrowej w przyjętym układzie odniesienia ( po orientacji bezwzględnej modelu)
Analizy rastrowe typu algebra map na warstwie NMT oraz NMPT
Stereomatching
Pytanie 104
System RapidEye charakteryzuje się następującą liczbą satelitów na jednej orbicie
okołobiegunowej:
5
1
3
Pytanie 105
Metoda tworzenia barw addytywna to inaczej:
RGB
CMYK
YCbCr
Pytanie 106
Rozdzielczość spektralna skanera AISA Specim wynosić może:
0,5m
255 kanałów
4MS + 1 PAN
Pytanie 107
Numeryczny model wysokościowy wygenerowany dla całego niemal globu z poziomu satelitarnego przy wykorzystaniu pasywnego systemu teledetekcyjnego to:
ASTER GLOBAL DEM ze zdjęć wielospektralnych
SRTMITED z radaru dopplerowskiego
SLS – system satelitarnego skanowania laserowego
Pytanie 108
Satelita środowiskowy o rozdzielczości kanału PAN = 15m oraz kanałów MS = 30m (poza 1 termalnym) oraz 7 kanałów spektralnych to:
LANDSAT 7 ETM+
LANDSAT TM 5
ASTER
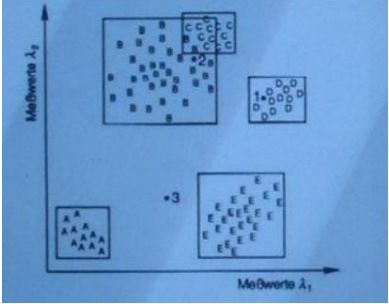
Pytanie 109
Algorytm klasyfikacji nadzorowanej przedstawionej na rysunku u góry to:
Minimum dystanse
Parallelepiped (Box classifier)
OBIA
Pytanie 110
Generowanie znormalizowanej chmury punktów ze skanowania laserowego dokonuje się na
drodze:
Na odjęciu od rzędnej Z każdego punktu chmury ALS wartości numerycznego modelu terenu (gruntu)
Dodaniu do modelu NMT wysokości przelotu samolotu ( wartośd z GPS)
Odpowiedniej kalibracji skanera producenta sprzętu
Pytanie 111
Rozmiarem piksela 0,5 m ( plus minus 0,2m) w trybie PAN charakteryzuje się system:
WorldView-3
WorldView-1
WordView – 2
GeoEye – 1
Pytanie 112
Model poziomicowy nieregularny:
Został opracowany przez kartografów chioskich w XV w
Wprowadzony do kartografii stosunkowo nie dawno bo w wieku XIX
Znany jest od czasów odkrywców Ameryki Północnej
Pytanie 113
Stereomatching :
Pozwala w trybie 3D oglądać przestrzennie zdjęcia lotnicze
Pozwala automatycznie generować punkty pomiarowe na obiektach 3D na podstawie autokorekcie pikseli obrazu na dwóch sąsiednich zdjęciach lotniczych stanowiących stereogram
Może częściowo zastąpid skaning laserowy dla obiektów oświetlonych dostarczając przy okazji informacji radiometrycznych ze zdjęd lotniczych, jednak dla obszarów leśnych istnieje problem generowania punktów na dnie drzewostanu
Pytanie 114
Jaki jest błąd dopuszczalny ( w metrach rzędnej Z) NMT generowanego w oparciu o zdjęcia lotnicze wykonywane z poziomu około 4 000m:
+-0,8 – 1,2m
+-2,0 -5,0m
+-0,01 -0,20m
Pytanie 115
Sygnatura spektralna to:
Zakres światła w termalnej podczerwieni
Podpis elektroniczny firmy dostarczającej danych satelitarnych ( znak wodny)
Charakterystyka ( statystyka) rozkładu wartości pikseli danego pola treningowego w 2D lub 3D przestrzeni kanałów
Pytanie 116
Lotniczy skaning laserowy (ALS):
Zawyża wysokośd drzewostanu ze względu na obrazowanie jedynie drzew a nie ich podstaw ( pnia), stąd nie można odnaleźd pni do pomiaru
Zwykle zaniża wysokość drzewostanu ze względu na niewielkie prawdopodobieostwo trafienia impulsem w wierzchołek drzewa
Impulsy skanera pozostają w 100% w środkowej części korny i nie wnikają niżej
Pytanie 117
Rozdzielczość terenowa satelitów VHR definiowana jest obecnie poniżej:
5m
30m
1m
Pytanie 118
Klasyfikacja obiektowa tzw. OBIA wykorzystuje:
Barwę ( jaskrawość) , wielkość obiektu (skalę), kształt ( zwartość) teksturę i zależności sąsiedztwa (logiczne związki)
Jedynie wartość jaskrawości (jasność) piksela
Działa jedynie w oparciu o zdefiniowane pola treningowe ( AOI)
Pytanie 119
Dane do generowania DTM można pozyskać z:
Z pomiarów wysokościomierzem Vertex na zdjęciach lotniczych , orto foto map, z pomiarów georadarem
Technologii ALS TLS z georeferencją pomiarów GNSS, stereogramów lotniczych zorientowanych bezwzględnie
Pomiarów geodezyjnych , technologii TLS pomiarów dGPS, pomiarów interferometrycznych , ze skaningu satelitarnego SLS
Pytanie 120
Problem modelowania 3D polega przede wszystkim na :
Brak odpowiednich technologii do przeprowadzenia precyzyjnego pomiaru
Odpowiednim zgromadzeniu środków finansowych na przeprowadzenie wektoryzację map warstwicowych
Odpowiednim doborze charakterystycznych punktów reprezentujących powierzchnię terenu ( obiektu) oraz odpowiednim doborze algorytmów przetwarzających wizualizacji
Pytanie 121
Satelita GeoEye – 1 posiada liczbę kanałów spektralnych (MS):
3
1
4
8
Pytanie 122
Znormalizowany Numeryczny Model Powierzchni terenu wykonuje się:
Wektoryzując informacje w postaci warstwic i pikiet wysokościowych topograficznych
Stereodigitalizując warstwice na stereogramie zdjęd lotniczych
Wykorzystując informację z chmury punktów pierwszych i ostatnich skaningów laserowych
Pytanie 123
UAV to:
Nowy system satelitów nawigacyjnych
Promieniowani z zakresu UV
Statki bezzałogowe wykorzystywane do pozyskiwania zdalnych zobrazowań
Pytanie 124
Technologia zwana MMS lub MLS wykorzystuje m.in.:
Pomiar pola grawitacyjnego Ziemi celem określenia wielkości i odległości obiektu
Kamery cyfrowe oraz urządzenia IMU + GPS zamontowane na mobilnym pojeździe
Skanery laserowe, odbiorniki GNSS, urządzenia IMU, oraz odometr zamontowany w samochodzie
Pytanie 125
Gęstość pozyskiwanej chmury punktów ALS w projekcie ISOK wynosi :
Dla obszarów miast 4 pkt /m2
Dla obszarów priorytetowych 1 pkt / m2
Dla obszarów miast 12 pkt / m2 (naloty krzyżowe )
Pytanie 126
ISOK to:
Nowy model globalny dla Europy wykonany skanerem ASTER
Informatyczny System Ochrony Kolei prze awariami
Informatyczny System Osłony Kraju przed nadzwyczajnymi zagrożeniami
Pytanie 127
Poligon Vornoi:
To tereny największego spadku w modelu GRID
To proces wyznaczania takich obszaróa. w których każdy punkt znajduje się bliżej określonego punktu ze zbioru punktów niż od pozostałych punktów
To inaczej tessalacja Dirichleta
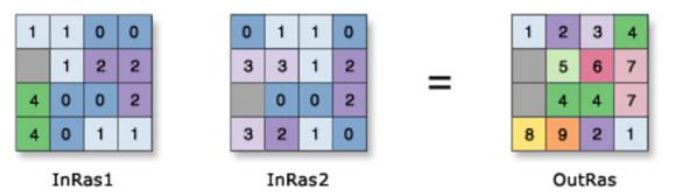
Pytanie 128
Rysunek przedstawia analizę:
Analizę największego spadku
Sumowania komórek rastrów
Analizę cross tabulacji czyli szukania wariant
Pytanie 129
Różnica między strefą a grupą (regionem) w modeli rastrowym polega na :
Piksele posiadające wspólną granicę ( bok lub narożnik) tworzą grupy a strefy są tworzone przez piksele samych wartościach bez potrzeby warunku graniczenia
Poligony strefy zawierają grupy
Poligony grup skupiają strefy
Pytanie 130
Satelita koreański FORMOSAT-2 charakteryzuje się:
Sensorem o rozdzielczości terenowej (GSD)= 2 dla kanału PAN
Sensorem o rozdzielczości terenowej (GSD)= 0,5 dla kanału super PAN
Sensorem o rozdzielczości terenowej (GSD) = 8 dla kanałów MS
Pytanie 131
Metoda klasyfikacji która nie musi korzystać z pól treningowych i może odbywa się automatycznie to tzw.:
Klasyfikacja typu ISOCLASS
Klasyfikacja pikselowa
Analiza OBIA
Pytanie 132
System LiDAR umożliwiający monitoring lodowców i pokrywy śnieżnej z poziomu satelitarnego
wykorzystujący technologię LiDAR fullwaveform to:
ICESat GLAS
LANDSAT
NOAA
Pytanie 133
Landsat Data Continuity Mission (LDCM) związana jest z wystrzeleniem w 2013 roku na orbitę:
satelity geostacjonarnego LANDSAT8
satelity okołobiegunowego LANDSAT 8
satelity Plaiades-2