
Pytania i odpowiedzi
Geomatyka
Zebrane pytania i odpowiedzi do zestawu. Test GIS
Ilość pytań: 201
Rozwiązywany: 29397 razy
Pytanie 101
Co oznacza skrót SRTM(ITEB) ?
NMPT zrealizowany aktywnym systemem satelitarnym podczas misji promu kosmicznego w roku 2000
Pytanie 102
Metadane to :
np. dane opisujące zastosowane odwzorowanie kartograficzne czy właściciela danych
Pytanie 103
GRAF to:
graficzna forma matematycznie zdefiniowanego sąsiedztwa obiektów wektorowych (tworzona z węzłów i krawędzi)
Pytanie 104
Generowanie NMPT jet możliwe w oparciu o takie systemy satelitarne jak:
IKONS, SPOT, TerraSAR-X
Pytanie 105
Orientacja zewnętrzna kamery pomiarowej jest określona
poprzez podanie położenia środka rzutów w chwili ekspozycji zdjęcia oraz orientacji kamery w przestrzeni trzema kątami(nachylenia, kierunkowy osi oraz skręcenia)
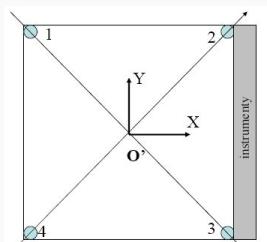
Pytanie 106
współrzędne znaczka tłowego nr3 to
x=106.01mm, y=-105.98 mm
Pytanie 107
Akronim LiDAR pochodzi od słów
light detection and ranging
Pytanie 108
Technologia LiDAE
zaliczana jest do aktywnych systemów pozyskiwania danych
swą zasadą działania zbliżona jest do dalmierza laserowego
Pytanie 109
Orientacja wzajemna (względna) modelu
to proces wzajemnego przyporządkowania dwóch wiązek promieni w taki sposób aby promienie homologicznie przecinały się
jest określana przez pięć parametrów kątowych lub kątowo- liniowych informujących o wzajemnym położeniu pary zdjęć sterogramu
Pytanie 110
Skrót GPS oznacza
Global Positioning System
Pytanie 111
Elementy orientacji wewnętrznej
umożliwiają okręślenie środka rzutów w stosunku do płaszczyzny zdjęcia
to współrzędne tłowe głównego punktu oraz ogniskowa
Pytanie 112
System ALS w porównaniu do TLS
charakteryzuje się niższymi kosztami w przeliczeniu na km2 skanowania
wymaga zastosowania układu INS
Pytanie 113
Technologia dGPS w porównaniu z GPS różni się
możliwościa stosowania poprawek
dokładnością
Pytanie 114
Punkty Grubera to punkty do wykrywania orientacji
wzajemnej
Pytanie 115
Odbiornik Trimblepathfinder ProXRS to odbiornik
kartograficzny (GIS)
Pytanie 116
Dataloggery(trackery) GPS umożliwiają
zapis przejścia szlaku turystycznego
geotagowanie zdjęć
Pytanie 117
Pozycja (X,Y,Z) obiektu określanego w pomiarze dGPS (tryb rover station) to
pozycja środka anteny zestawu ruchomego (roer)
Pytanie 118
ASG-EUOPS to
system około 90 naziemnych stacji referencyjnych (bazowych) GPS rozmieszczonych na obszarze Polski
Pytanie 119
Dokładność wyznaczenia pozycji odbiornikiem Trimble Pathfinder ProXPS w trybie dGPS wynosi
1m pod okapem drzewostanu
lepiej niż 0,5m- teren otwarty
Pytanie 120
Skrót GPS oznacza
Global Positioning System