Twój wynik: AIR nowe:)
Analiza
Wszystkie ({{dataStorage.userResults.answersTotal}})
Prawidłowe ({{dataStorage.userResults.answersGood}})
Do powtórki ({{dataStorage.userResults.answersRepeat}})
Błędne ({{dataStorage.userResults.answersBad}})
Pytanie 1
Głównym prawem (zadaniem) układu regulacji
jest:
D. Ograniczenie przeregulowania
C. Utrzymanie ujemnej wartości uchybu
A. Zastosowanie regulatora z członem całkującym
B. Utrzymanie uchybu na poziomie bliskim zeru
Pytanie 2
Na czym polega linearyzacja modelu
matematycznego?
D. Na zastąpieniu nieliniowego modelu matematycznego drugą harmoniczną
A. Na zastąpieniu liniowego modelu matematycznego nieliniowym
B. Na zastąpieniu liniowego modelu matematycznego pierwszą harmoniczną.
C. Na zastąpieniu nieliniowego modelu matematycznego liniowym
Pytanie 3
akie pierwiastki równania charakterystycznego
powodują w charakterystyce czasowej układu
regulacji, drgania o stałej amplitudzie i
częstotliwości?
C. Urojone
D. Zespolone z dodatnią częścią rzeczywistą.
B. Zerowe rzeczywiste.
A. Ujemne rzeczywiste.
Pytanie 4
Jakie ujemne sprzężenie zwrotne nazywamy
elastycznym (podatnym)?
A. Takie, w którym występuje człon proporcjonalny.
C. Takie, w którym występuje człon idealnie całkujący.
D. Takie, w którym występuje człon inercyjny
B. Takie, w którym występuje człon idealnie różniczkujący
Pytanie 5
Jakie ujemne sprzężenie zwrotne nazywamy
sztywnym?
C. Takie, w którym występuje człon idealnie całkujący.
D. Takie, w którym występuje człon inercyjny.
A. Takie, w którym występuje człon proporcjonalny.
B. Takie, w którym występuje człon idealnie różniczkujący
Pytanie 6
Czy można wprowadzić zmiany do schematu
blokowego zawierającego dwa elementy
(człony) liniowe połączone szeregowo?
D. Można zbudować schemat równoważny ze sprzężeniem zwrotnym
A. Nie można zmienić położenia członów
C. Można zbudować schemat równoważny z połączeniem równoległym tych członów.
B. Można człony zamienić miejscami.
Pytanie 7
Kiedy element (człon) lub układ regulacji
nazywamy liniowym?
A. Gdy jest opisany wyłącznie za pomocą algebraicznych równań liniowych.
D. Gdy sygnały działające na układ mają postać liniowych funkcji czasu.
C. Gdy jest opisany za pomocą liniowych równań algebraicznych i różniczkowych.
B. Gdy jest opisany wyłącznie za pomocą równań różniczkowych liniowych.
Pytanie 8
Jak brzmi zasada superpozycji?
C. Odpowiedź układu liniowego na sumę sygnałów jest równa sumie odpowiedzi na każdy sygnał z osobna.
D. Odpowiedź układu liniowego na iloczyn sygnałów jest równa iloczynowi odpowiedzi na każdy sygnał z osobna.
B. Algebraiczna suma wszystkich sygnałów działających na układ jest różna od zera
A. Algebraiczna suma wszystkich sygnałów działających na układ jest równa zero.
Pytanie 9
W jakim miejscu układu regulacji należy
umieścić człon pomiarowy?
A. W torze głównym przed regulatorem
C. W torze głównym za obiektem
D. W torze sprzężenia zwrotnego.
B. W torze głównym przed obiektem
Pytanie 10
W jakim miejscu układu regulacji należy
umieścić regulator?
D. W torze sprzężenia zwrotnego.
C. W torze głównym za obiektem
B. W torze głównym, po głównym węźle sumacyjnym, przed obiektem
A. Na początku układu przed głównym węzłem sumacyjnym.
Pytanie 11
W jakim celu stosuje się regulatory w układach
regulacji?
A. Do kształtowania charakterystyk statycznych i dynamicznych układów
B. Do zbudowania modeli matematycznych układów.
C. Do badania stabilności układów.
D. Do otrzymania ujemnych sygnałów uchybu dla działających zakłóceń.
Pytanie 12
Jaki warunek obowiązuje w kryterium
stabilności Nyquista?
D. Charakterystyka amplitudowo-fazowa układu otwartego przechodzi kolejno przez wszystkie ćwiartki układu współrzędnych.
A. Charakterystyka amplitudowo-fazowa układu otwartego przy zmianach pulsacji ω od 0 do nieskończoności nie obejmuje punktu (-1, j0)
C. Wszystkie współczynniki równania charakterystycznego 𝑎...𝑎 mają ten sam znak.
B. Charakterystyka amplitudowo-fazowa układu otwartego przy zmianach pulsacji ω od 0 do nieskończoności obejmuje punkt (-1, j0).
Pytanie 13
Jaki jest warunek konieczny i wystarczający
stabilności asymptotycznej układu regulacji,
nałożony na pierwiastki równania
charakterystycznego?
B. Krotność par pierwiastków urojonych wynosi trzy.
D. Wszystkie pierwiastki rzeczywiste i części rzeczywiste pierwiastków zespolonych powinny być ujemne.
C. Występowanie pojedynczych pierwiastków na osi urojonej
A. Krotność pierwiastków rzeczywistych równych zeru wynosi dwa.
Pytanie 14
Do czego można wykorzystać charakterystykę
amplitudowo-fazową układu otwartego?
D. Do zbadania stabilności układu zamkniętego za pomocą kryterium Nyquista
B. Do wyznaczenia charakterystyki skokowej układu zamkniętego.
A. Do wyznaczenia charakterystyki impulsowej układu zamkniętego.
C. Do zbadania stabilności układu zamkniętego za pomocą kryterium Hurwitza
Pytanie 15
Czym charakteryzuje się sygnał wyjściowy
nadążnych układów regulacji?
B. Odtwarza zmianę sygnału wejściowego, przebiegającą według z góry zadanego programu.
A. Nadąża za zmianą sygnału wejściowego, mającą nieznany z góry charakter.
D. Jest niezależny od sygnału wejściowego.
C. Dla stałego sygnału wejściowego jest utrzymywany na stałej wartości.
Pytanie 16
Czym charakteryzuje się sygnał wyjściowy
stabilizacyjnych (stałowartościowych) układów
regulacji?
A. Nadąża za zmianą sygnału wejściowego, mającą nieznany z góry charakter.
C. Dla stałego sygnału wejściowego jest utrzymywany na stałej wartości.
B. Odtwarza zmianę sygnału wejściowego, przebiegającą według z góry zadanego programu.
D. Jest niezależny od sygnału wejściowego.
Pytanie 17
Jak wyznaczamy transmitancję zastępczą dwóch
elementów (członów) połączonych równolegle?
C. Dzieląc przez siebie transmitancje członów składowych
B. Odejmując transmitancje członów składowych.
A. Dodając algebraicznie transmitancje członów składowych
D. Mnożąc przez siebie transmitancje członów składowych
Pytanie 18
Jak wyznaczamy transmitancję zastępczą dwóch
elementów (członów) połączonych szeregowo?
D. Mnożąc przez siebie transmitancje członów składowych
B. Odejmując transmitancje członów składowych.
A. Dodając algebraicznie transmitancje członów składowych
C. Dzieląc przez siebie transmitancje członów składowych.
Pytanie 19
Co to jest uchyb regulacji w układach z
jednostkowym sprzężeniem zwrotnym?
D. Jest to różnica między sygnałem zakłócającym i wejściowym
A. Jest to różnica między sygnałem wejściowym i wyjściowym
B. Jest to różnica między sygnałem wyjściowym i wejściowym.
C. Jest to różnica między sygnałem wejściowym i zakłócającym.
Pytanie 20
Jakie sprzężenie zwrotne występuje zwykle w
układach regulacji?
C. Mnożące sygnał wejściowy przez sygnał sprzężenia zwrotnego
A. Dodające sygnał sprzężenia zwrotnego do sygnału wejściowego.
B. Odejmujące sygnał sprzężenia zwrotnego od sygnału wejściowego.
D. Dzielące sygnał wejściowy przez sygnał sprzężenia zwrotnego
Pytanie 21
Czy sygnał wyjściowy z układów regulacji
wykorzystywany jest do poprawy jakości
odpowiedzi tych układów, jeśli tak, to w jaki
sposób:
B. Jest mierzony i podawany jako sygnał sprzężenia do przodu.
A. Jest mierzony i podawany jako sygnał sprzężenia zwrotnego.
C. Jest mierzony i podawany jako kombinacja sygnałów sprzężenia zwrotnego i do przodu.
D. Jest nie mierzony i nie wykorzystywany do sprzężeń.
Pytanie 22
Czy sygnał wyjściowy z otwartych układów
sterowania wykorzystywany jest do poprawy
jakości odpowiedzi tych układów, jeśli tak, to w jaki sposób ?
C. Jest mierzony i podawany jako kombinacja sygnałów sprzężenia zwrotnego i do przodu
B. Jest mierzony i podawany jako sygnał sprzężenia do przodu
D. Jest nie mierzony i nie wykorzystywany do sprzężeń.
A. Jest mierzony i podawany jako sygnał sprzężenia zwrotnego.
Pytanie 23
Jaką wartość w stanie ustalonym przyjmuje
odpowiedź skokowa rzeczywistego elementu
(członu) różniczkującego?
A. Wartość zerową niezależną od stałej czasowej
B. Wartość niezerową niezależną od stałej czasowej.
D. Wartość nieskończenie wielką
C. Wartość niezerową zależną od stałej czasowej.
Pytanie 24
Jaki kształt ma odpowiedź skokowa elementu
(członu) idealnie całkującego?
B. Jest prostą nachyloną pod pewnym kątem do osi czasu
D. Jest parabolą.
C. Jest prostą pionową
A. Jest prostą poziomą.
Pytanie 25
Z jakiego zbioru charakterystyk czasowych
powstaje charakterystyka częstotliwościowa
elementu (członu) lub układu
D. Ze zbioru odpowiedzi na liniowo narastające sygnały wejściowe.
A. Ze zbioru odpowiedzi na impulsowe sygnały wejściowe.
C. Ze zbioru odpowiedzi na harmoniczne sygnały wejściowe.
B. Ze zbioru odpowiedzi na skokowe sygnały wejściowe
Pytanie 26
W jakim przypadku element (człon) oscylacyjny
2 rzędu ma charakterystykę skokową o
drganiach tłumionych?
A. Gdy liczba tłumienia jest równa zero.
D. Gdy liczba tłumienia pochodzi z przedziału otwartego zero-jeden.
C. Gdy liczba tłumienia wynosi minus jeden.
B. Gdy liczba tłumienia wynosi jeden.
Pytanie 27
Co powoduje zwiększenie liczby tłumienia w
transmitancji elementu (członu) oscylacyjnego 2
rzędu z wartości np. 0.1 do wartości 0.4 w
odniesieniu do przeregulowania czasowej
charakterystyki skokowej?
C. Powoduje zmniejszenie wartości przeregulowania.
B. Powoduje zwiększenie wartości przeregulowania
D. Powoduje wyzerowanie przeregulowania.
A. Nie ma wpływu na przeregulowanie
Pytanie 28
Jaką odpowiedź na skokowy sygnał wejściowy
generuje element (człon) oscylacyjny 2 rzędu,
mający liczbę tłumienia 0<<1, z uwagi na
amplitudę drgań?
C. Z drganiami o stałej amplitudzie.
A. Z drganiami o rosnącej amplitudzie
D. Bez drgań.
B. Z drganiami o malejącej amplitudzie.
Pytanie 29
Jaką odpowiedź na skokowy sygnał wejściowy
generuje element (człon) inercyjny 1 rzędu, z
uwagi na amplitudę drgań?
A. Z drganiami o rosnącej amplitudzie
C. Z drganiami o stałej amplitudzie
B. Z drganiami o malejącej amplitudzie.
D. Bez drgań.
Pytanie 30
Jakie parametry (współczynniki) zawiera
transmitancja operatorowa elementu (członu)
oscylacyjnego 2 rzędu?
D. Współczynnik wzmocnienia, czas opóźnienia i liczbę tłumienia.
A. Współczynnik wzmocnienia i stałą czasową.
C. Współczynnik wzmocnienia, stałą czasową i liczbę tłumienia.
B. Współczynnik wzmocnienia i liczbę tłumienia.
Pytanie 31
Jakim elementem ze względu na rząd równania,
jest element całkujący rzeczywisty?
D. Elementem 3 rzędu.
A. Elementem 0 rzędu
B. Elementem 1 rzędu.
C. Elementem 2 rzędu.
Pytanie 32
Jakie parametry (współczynniki) zawiera
transmitancja operatorowa członu idealnie
całkującego?
C. Współczynnik wzmocnienia lub stałą czasową i liczbę tłumienia.
A. Współczynnik wzmocnienia lub stałą czasową
D. Współczynnik wzmocnienia lub czas opóźnienia.
B. Współczynnik wzmocnienia lub liczbę tłumienia.
Pytanie 33
Jakie parametry (współczynniki) zawiera
transmitancja operatorowa członu inercyjnego
1 rzędu?
D. Współczynnik wzmocnienia i czas opóźnienia.
C. Współczynnik wzmocnienia, stałą czasową i liczbę tłumienia
A. Współczynnik wzmocnienia i stałą czasową
B. Współczynnik wzmocnienia i liczbę tłumienia
Pytanie 34
Jaka jest zależność pomiędzy odpowiedzią
impulsową a skokową elementu (członu) lub
układu automatyki?
A. Odpowiedz skokowa jest pochodną odpowiedzi impulsowej
C. Odpowiedz impulsowa jest transformatą Laplace’a odpowiedzi skokowej.
D. Odpowiedz impulsowa jest transformatą Fouriera odpowiedzi skokowej.
B. Odpowiedz skokowa jest całką odpowiedzi impulsowej.
Pytanie 35
Jakim elementem (członem) jest obiekt z
samowyrównaniem?
B. Członem, którego wartość odpowiedzi skokowej dąży do nieskończoności.
A. Członem całkującym z inercją.
D. Członem, którego odpowiedź zawsze się zeruje.
C. Członem, którego wartość odpowiedzi skokowej dąży do wartości ustalonej.
Pytanie 36
Jaką postać ma mianownik transmitancji
elementu (członu) inercyjnego 2 rzędu?
A. (𝑇ଵ𝑠 – 1)(𝑇ଶ𝑠 – 1) lub (𝑇𝑠 + 1)
C. (𝑇ଵ𝑠 – 1)(𝑇ଶ𝑠 – 1) lub (𝑇𝑠 − 1)2
B. (𝑇ଵ𝑠 + 1)(𝑇ଶ𝑠 + 1) lub (𝑇𝑠 − 1)2
D. (𝑻𝟏𝒔 + 𝟏)(𝑻𝟐𝒔 + 𝟏) lub (𝑻𝒔 + 𝟏)𝟐
Pytanie 37
Jaką postać ma mianownik transmitancji
elementu (członu) inercyjnego 1 rzędu?
C. 𝑇𝑠 + 2
D. 𝑇𝑠 − 2
B. 𝑇𝑠 − 1
A. 𝑻𝒔 + 𝟏
Pytanie 38
Jaką zależność przedstawia transmitancja
operatorowa (funkcja przejścia) elementu
(członu) lub układu automatyki?
D. Pomiędzy transformatami Laplace’a: sygnału wyjściowego i wejściowego, przy niezerowych warunkach początkowych.
B. Pomiędzy transformatami Fouriera: sygnału wyjściowego i wejściowego, przy zerowych warunkach początkowych.
A. Pomiędzy sygnałami czasowymi: wyjściowym i wejściowym, przy zerowych warunkach początkowych
C. Pomiędzy transformatami Laplace’a: sygnału wyjściowego i wejściowego, przy zerowych warunkach początkowych.
Pytanie 39
Ile wynosi transformata splotu dwóch funkcji
czasu mających znane transformaty?
B. Jest równa różnicy transformat tych funkcji
C. Jest równa iloczynowi transformat tych funkcji
D. Jest równa ilorazowi transformat tych funkcji.
A. Jest równa sumie transformat tych funkcji
Pytanie 40
Jakie twierdzenie stosuje się do wyznaczenia
transformaty sumy funkcji czasu?
A. O liniowości.
B. O różniczkowaniu oryginału
D. O transformacie splotu.
C. O całkowaniu oryginału
Pytanie 41
Jakiego rodzaju sygnały wymuszające są
stosowane przy wyznaczaniu charakterystyk
czasowych elementów (członów) i układów
automatyki?
B. Sygnał skokowy
A. Sygnał losowy
D. Widmo częstotliwości.
C. Sygnał harmoniczny
Pytanie 42
Jakie mamy właściwości eksploatacyjne
układów regulacji?
A. Amplituda rezonansowa
D. Z transmitancji toru głównego
B. Uchyb statyczny
C. Przeregulowanie i czas regulacji.
Pytanie 43
Z jakiej transmitancji tworzymy równanie
charakterystyczne układu zamkniętego?
C. Z transmitancji układu otwartego.
B. Z transmitancji układu zamkniętego.
A. Z transmitancji członu inercyjnego
D. Z transmitancji toru głównego
Pytanie 44
Jakie działanie regulatora PID można pominąć
przy sterowaniu obiektem astatycznym?
B. części całkującej
A. części różniczkującej
D. podwójnego różniczkowania
C. części proporcjonalnej
Pytanie 45
Jaką transmitancję można znaleźć za pomocą
linii pierwiastkowych (mgp)?
A. Transmitancje ukł. otwartego
D. Transmitancje toru głównego
C. Transmitancje zakłóceniowa
B. Transmitancje ukł. zamkniętego
Pytanie 46
Jakie ujemne sprzężenie zwrotne nazywamy elastycznym (podatnym)?
C. idealnie całkujący
B. idealnie różniczkujący
D. inercyjny
A. Takie, w którym występuje człon proporcjonalny
Pytanie 47
Jakie pierwiastki równania charakterystycznego
powodują w charakterystyce czasowej układu
regulacji drgania o stałej amplitudzie i
częstotliwości?
B. zerowe rzeczywiste
A. ujemne rzeczywiste
D. zespolone z dodatnią częścią rzeczywist
C. urojone
Pytanie 48
Z jakich charakterystyk korzystamy wyznaczając
zapas stabilności?
A. z linii pierwiastkowych (mgp)
B. z charakterystyk czasowych ukł. otwartego
D. z charakterystyk częstotliwościowych ukł. otwartego
C. z charakterystyk czasowych ukł. zamknietego
Pytanie 49
Sprzężenie zwrotne w ukł. automatycznej
regulacji jest
C. ujemne lub dodatnie
B. zawsze dodatnie
A. zawsze ujemne
D. jeden chuj jakie
Pytanie 50
Jaki czas nazywamy krytycznym czasem
opóźnienia?
D. Jest to czas niemający związku ze stabilnością.
C. Jest to czas określony dla granicy stabilności.
B. Jest to czas powodujący pogorszenie stabilności układu regulacji.
A. Jest to czas powodujący poprawienie stabilności układu regulacji.
Pytanie 51
Jakie przeregulowanie i czas regulacji w
charakterystyce skokowej układu otrzymujemy
z kryterium stabilności aperiodycznej?
A. Duże przeregulowanie i mały czas regulacji
C. Zerowe przeregulowanie i mały czas regulacji.
B. Małe przeregulowanie i duży czas regulacji.
D. Zerowe przeregulowanie i duży czas regulacji.
Pytanie 52
Jaki regulator likwiduje lub zmniejsza uchyb
statyczny?
C.PI
D.DD
B.PD
A.PP
Pytanie 53
Jak badamy stabilność układów regulacji z
opóźnieniem?
D. Za pomocą kryterium Nyquista
B. Za pomocą kryterium stabilności aperiodycznej
A. Za pomocą kryterium Michajłowa
C. Za pomocą kryterium całkowego.
Pytanie 54
Jaką metodę stosujemy do doboru stałych
czasowych regulatora?
A. Metodę Zieglera-Nicholsa.
B. Metodę linii pierwiastkowych (mgp)
C. Metodę dominujących stałych czasowych
D. Metodę zapasu fazy
Pytanie 55
Jaki regulator skraca czas regulacji?
B. PD
A. PP
C.PI
D.DD
Pytanie 56
Jeżeli wzmocnienie wyrażone w dB, na
charakterystyce amplitudowo-
częstotliwościowej układu automatyki na stałą
wartość, równą zero to:
D. Amplituda sygnału wejściowego jest większa niż amplituda sygnału wyjściowego
B. Amplituda sygnału wejściowego jest większa niż amplituda sygnału wyjściowego
C. W układzie nie następuje wzmocnienie sygnału
A. Amplitudy sygnałów wejściowego i wyjściowego w tym układzie mają tę samą wartość
Pytanie 57
Minimalizację funkcji logicznych z
wykorzystaniem tablic Karnaugh’a stosujemy
dla układów:
C. Przełączających
B. Kombinacyjnych
A. Sekwencyjnych
D. Synchronicznych
Pytanie 58
Co powoduje zwiększanie bezwzględnego
współczynnika tłumienia elementu
oscylacyjnego 2- go rzędu?
A. Zmniejszenie wartości rezonansu na charakterystyce amplitudowo-częstotliwościowej elementu oscylacyjnego
D. Zmniejszenie wartości maksymalnego przeregulowania w odpowiedzi skokowej elementu oscylacyjnego
B. Zwiększenie wartości maksymalnego przeregulowania w odpowiedzi skokowej elementu oscylacyjnego
B. Zwiększenie wartości maksymalnego przeregulowania w odpowiedzi skokowej elementu oscylacyjnego
Pytanie 59
Drugi warunek kryterium Hurwitza, dla
stabilnego układu automatyki IV-go rzędu,
mówi o tym, że:
A. Wszystkie podwyznaczniki główne (minory) wyznacznika ∆ muszą być mniejsze od zera
C. Wszystkie podwyznaczniki główne (minory) wyznacznika ∆ muszą być większe od zera
B. Podwyznaczniki główne (minory) wyznacznika ∆, do stopnia n-1, muszą być większe od zer
D. Podwyznaczniki główne (minory) wyznacznika ∆, do stopnia n-1, muszą być mniejsze od zera
Pytanie 60
Modelowanie układów automatyki w
przestrzeni stanów polega na
A. Zapisaniu równania różniczkowego n-tego rzędu, będącego modelem układu automatyki jako n równań 1-go rzędu
C. Zapisaniu transmitancji operatorowej układu automatyki
D. Przestrzennym rozkładzie wektora sterowania i wektora stanu
B. Zdefiniowaniu macierzy stanu, macierzy wejść, macierzy wyjść i macierzy transmisji, odpowiednich do rzędu rozpatrywanego układu
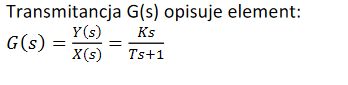
Pytanie 61
Transmitancja operatorowa układu automatyki
przedstawia zależność pomiędzy:
B. Transformatami Laplace’a sygnału wyjściowego i wejściowego, przy zerowych warunkach początkowych
C. Transformatami Fourier’a sygnału wyjściowego i wejściowego, przy zerowych warunkach początkowych
A. Sygnałami wejściowym i wyjściowym, przy zerowych warunkach początkowych
D. Transformatami Laplace’a sygnału wyjściowego i wejściowego, przy niezerowych warunkach początkowych
Pytanie 62
Jaka jest zależność pomiędzy odpowiedzią
impulsową a skokową dla konkretnego 1 układu
automatyki?
B. Odpowiedz skokowa jest całką odpowiedzi impulsowej
C. Odpowiedz impulsowa jest pochodną odpowiedzi skokowej
D. Odpowiedz impulsowa jest równa odpowiedzi skokowej
A. Odpowiedz skokowa jest pochodną odpowiedzi impulsowe
Pytanie 63
Jakiego typu układem logicznym jest układ
sekwencyjny?
D. Układ logiczny, którego działanie opisane jest funkcją przełączającą określającą sekwencję ruchów układu wykonawczego
B. Układ logiczny z elementami pamiętającymi, którego wyjścia zależą od ciągu stanów pojawiających się na jego wejściach (także z uwzględnieniem stanów poprzednich)
A. Układ logiczny, którego wyjścia zależą wyłącznie od stanu jego wejść bieżących, tzn. nie zależą od stanów, które pojawiły się na wejściach układu w przeszłośc
C. Układ logiczny w postaci układu synchronicznego lub asynchronicznego
Pytanie 64
Jakie są warunki kryterium stabilności Nyquista?
B. Jeżeli układ otwarty jest niestabilny i jego transmitancja ma 𝑁 biegunów w prawej półpłaszczyźnie to układ zamknięty jest stabilny wówczas, gdy wykres charakterystyki amplitudowo-fazowej 𝐺(𝑗𝜔) przy zmianach pulsacji ω od 0 do 1 obejmuje punkt (-1, j0), 𝑁/2 razy.
C. Jeżeli układ otwarty jest stabilny asymptotycznie, to układ zamknięty jest stabilny asymptotycznie wówczas, gdy wykres charakterystyki amplitudowo-fazowej 𝐺(𝑗𝜔) przy zmianach pulsacji ω od 0 do 1 obejmuje punkt (-1, j0)
D. Warunkiem koniecznym stabilności jest, aby wszystkie współczynniki wielomianu charakterystycznego 𝒂𝒏...𝒂𝟎 posiadały ten sam znak.
A. Jeżeli układ otwarty jest stabilny asymptotycznie, to układ zamknięty jest stabilny asymptotycznie wówczas, gdy wykres charakterystyki amplitudowo-fazowej 𝐺(𝑗𝜔) przy zmianach pulsacji ω od 0 do 1 nie obejmuje punktu (-1, j0)
Pytanie 65
Jakie są podstawowe własności transmitancji?
A. transmitancja układu automatyki jest jego modelem matematycznym
B. transmitancje wielu fizycznie różnych układów mogą być identyczne
D. opisu w postaci transmitancji nie można stosować dla układów wielowymiarowych
C. postać transmitancji operatorowej stanowi kryterium klasyfikacji elementów automatyki
Pytanie 66
Charakterystyki częstotliwościowe mogą być
wykorzystywane do:
B. określenia częstotliwości rezonansowej
D. zbudowania schematu funkcjonalnego
C. zbadania stabilności układów regulacji
A. identyfikacji obiektu, ponieważ określają jego własności dynamiczne
Pytanie 67
Charakterystyka częstotliwościowa jest
odpowiedzią obiektu na:
B. skokowy sygnał wejściowy
D. sygnał liniowo narastający
C. sinusoidalny sygnał wejściowy w stanie ustalonym
A. impuls Diraca
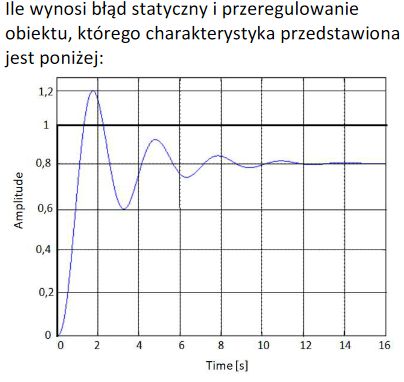
Pytanie 68
A. epsilon = 0.2; K = 1-0.6/1-1.2 * 100%
D. epsilon = 0.2; K = 50%
C. epsilon = 0.2; K = 0.8-0.6/(0.8-1.2) * 100%
B. epsilon = 0.8; K= 20%
Pytanie 69
W którym przypadku powstaną w układzie
drgania tłumione:
0<*<1
*>=1
* = 0
*<= 1
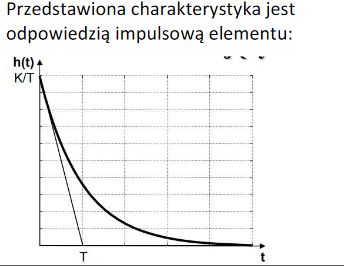
Pytanie 70
A. proporcjonalnego
B. całkującego idealnego
C. inercyjnego I-go rzędu
D. różniczkującego rzeczywistego
Pytanie 71
Sygnały deterministyczne:
A. można opisać określoną zależnością matematyczną
C. to sygnały poliharmoniczne i harmoniczne
B. to sygnały prawie okresowe i przejściowe
D. to sygnały zmieniające się w czasie w sposób, którego nie da się przewidzieć
Pytanie 72
A. który nie posiada zer, a jego biegun wynosi T
C. którego zero wynosi 0 a biegun jest równy (-1/T)
B. całkujący rzeczywisty
D. różniczkujący rzeczywisty
Pytanie 73
Uchyb regulacji może być wywołany przez:
B. zmianą parametrów układu
A. źle dostrojony regulator
C. zmianę wartości zadanej
D. sygnały zakłócenia
Pytanie 74
Uchybem regulacji nazywamy:
B. różnicę pomiędzy wartością regulowaną a zakłóceniem
D. różnicę pomiędzy wartością wyjściową a wejściową
C. różnicę pomiędzy wartością zadaną a regulowaną
A. błąd regulacji
Pytanie 75
Wzór na transformatę Laplace’a drugiej
pochodnej jest postaci:
A. s^2F(s) - sf(0) - f'(0)
D. F(s) - s^2f(0) - sf'(0)
C. s^2F(s) - sf'(0) - sf(0)
B. s^2F(s) + sf(0) + f'(0)
Pytanie 76
Która transmitancja opisuje obiekt statyczny:
G(s) = k/(T1s +1 )(T2s +1)
G(s) = k/s(Ts+1)
G(s) = k/s
G(s) = k/(Ts +1)
Pytanie 77
Czym charakteryzują się obiekty statyczne:
D. wartość odpowiedzi skokowej dąży do wartości skończone
C. nie mają działania całkującego
B. są obiektami z samowyrównaniem
A. wartość odpowiedzi skokowej dąży do nieskończoności
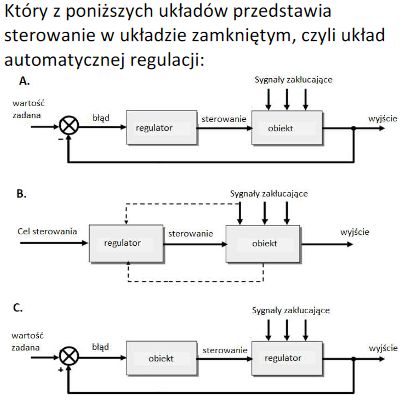
Pytanie 78
A. A
B. B
C. B i C
D. żaden
Pytanie 79
Układ automatycznej regulacji jest liniowy,
jeżeli:
B. opisany jest liniowymi równaniami różniczkowymi
D. nie spełnia zasady superpozycj
C. spełnia zasadę superpozycji
A. opisany jest nieliniowymi równaniami różniczkowymi
Pytanie 80
Bieguny po lewej stronie na płaszczyźnie
zmiennej zespolonej
A. Dają oscylacyjne odpowiedzi układu
D. powodują niestabilną pracę układu
B. Nie dają oscylacyjnych odpowiedzi układu
C. dają silne przeregulowanie
Pytanie 81
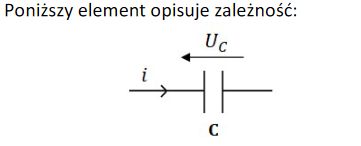
i = C dUc/dt + Uc(0)
i = C dUc/dt
Uc = 1/C całka i(t)dt - Uc(0)
Uc = 1/C całka i(t)dt + Uc(0)
Pytanie 82
Sprzężenie zwrotne:
B. zaczyna się od węzła sumacyjnego a kończy na wyjściu
A. powinno mieć większe wzmocnienie niż tor główn
C. powinno być maksymalnie odporne na wpływ zakłóceń
D. zaczyna się od wyjścia a kończy na węźle sumacyjnym
Pytanie 83
Zastosowanie układu regulacji z regulatorem
typu P
D. zmniejszając wartość współczynnika wzmocnienia, zwiększamy uchyb ustalony
C. zmniejsza wpływ zakłóceń
nic nie robi idk
A. zmniejsza uchyb ustalony
Pytanie 84
Nastawy regulatora PID można dobrać metodą
Zieglera-Nicholsa
A. w oparciu o znajomość modelu matematycznego układu
C. w układzie otwartym określić wartości opóźnienia L i dominującej stałej czasowej Tp i z tablic dobrać nastawy podstawiając powyższe parametry
D. ze wstępnej znajomości parametrów regulatora
B. w układzie zamkniętym pozostawić tylko wzmocnienie i zwiększać go do wystąpienia oscylacji a następnie do wzorów podstawić czas oscylacji krytycznych i wzmocnienie krytyczne
Pytanie 85
Co to jest dokładność dynamiczna?
D. określa zdolność układu do wiernego i szybkiego śledzenia wartości zadanej
A. dokładność dynamiczna jest określana w stanie przejściowym
C. miarą dokładności dynamicznej jest uchyb ustalony
B. dokładność dynamiczna jest określana w stanie ustalonym
Pytanie 86
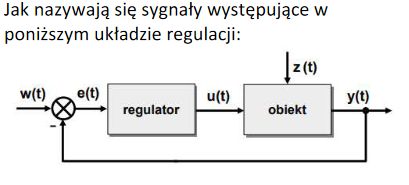
C. e(t) - sygnał uchybu regulacji, u(t) sygnał wyjściowy(regulowany
D. e(t) - sygnał uchybu regulacji, y(t) - sygnał wyjściowy(regulowany
B. e(t) - sygnał wartości zadanej, u(t) - sygnał sterujący
A. w(t) - sygnał wartości zadanej, u(t) - sygnał sterujący
Pytanie 87
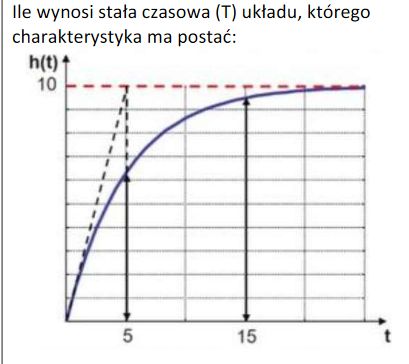
10s
15s
5s
3s
Pytanie 88
Transmitancja operatorowa jest to:
B. stosunek transformaty sygnału wejściowego do transformaty sygnału wyjściowego
C. stosunek transformaty sygnału wejściowego do transformaty sygnału wyjściowego przy zerowych warunkach początkowych
A. stosunek transformaty Laplace’a sygnału wyjściowego Y(s) do transformaty Laplace’a sygnału wejściowego przy założeniu, że wszystkie warunki początkowe są zerowe
D. stosunek transformaty sygnału wyjściowego do transformaty sygnału wejściowego przy zerowych warunkach początkowych
Pytanie 89
C. Stabilny nieasymptotycznie
B. Niestabilny
D. Niesterowalny
A. Stabilny asymptotycznie
Pytanie 90
Regulator PID opisany jest transmitancją:
Gr(s) = Kp + Kp/Tis + KpTdS
Gr(s) = Kp + KpTdS
Gr(s) = Kp(1+1/Tis + TdS)
Gr(s) = Kp(1+TdS)
Pytanie 91
Zadaniem układu regulacji nie jest:
D. Ograniczenie przeregulowani
C. Utrzymanie ujemnej wartości uchybu
B. Utrzymanie uchybu na poziomie bliskim zeru
A. Zastosowanie regulatora tylko z członem całkującym
Pytanie 92
D. Stabilny nieasymptotycznie
A. Stabilny asymptotycznie
C. Niestabilny
B. Na granicy stabilnośc
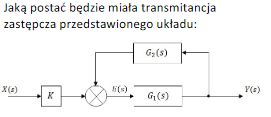
Pytanie 93
C. G= KG2/ 1 - G1G2
D.G = G2/1 - KG1G2
A. 𝐺 = K/1+G1G2
B. G = KG1/1 + G1G2
Pytanie 94
Układ automatycznej regulacji jest układem ze
sprzężeniem zwrotnym
A. Dodatnim
D. Nie ma znaczenia
B. Zawsze ujemnym
C. Dodatnim lub ujemnym
Pytanie 95
Jakim układem jest obiekt z
samowyrównaniem
C. Statycznym
A. Obiektem, którego wartość odpowiedzi skokowej dąży do wartości skończone
D. Całkującym z inercją
B. Obiektem, którego wartość odpowiedzi skokowej dąży do nieskończonośc
Pytanie 96
Wskaż zdanie/a prawdziwe:
B. Odpowiedź skokowa h(t) jest pochodną odpowiedzi impulsowej g(t)
C. Odpowiedź impulsową g(t) otrzymujemy poprzez zastosowanie jako wymuszenia funkcji 𝛿(t
A. Odpowiedź impulsową g(t) otrzymujemy poprzez zastosowanie jako wymuszenie funkcji 1(t)
D. Odpowiedź impulsowa g(t) jest pochodną odpowiedzi skokowej h(t
Pytanie 97
Warunkiem koniecznym i wystarczającym
stabilności nieasymptotycznej układu jest, aby
B. krotność pierwiastków rzeczywistych równych zeru i krotność par pierwiastków urojonych, powinna być co najwyżej równa jednośc
D. wszystkie podwyznaczniki główne (minory) były większe od zera
A. wszystkie pierwiastki rzeczywiste i części rzeczywiste pierwiastków zespolonych powinny być ujemne
C. na osi urojonej występują pierwiastki pojedyncze
Pytanie 98
Jakiego rodzaju regulator należy zastosować,
aby doprowadzić do skrócenia czasu regulacji?
PD
PI
P
PID
Pytanie 99
Jakiego rodzaju sygnały wymuszające są
stosowane przy wyznaczaniu charakterystyk
czasowych?
A. Skok jednostkowy
C. Sygnał liniowo narastający
D. Impuls Diraca
B. Widmo częstotliwości
Pytanie 100
Sygnały w układach sterujących dzieli się na:
C. ciągłe i cyfrowe
A. deterministyczne i losowe
D. deterministyczne i stochastyczne
B. ciągle i dyskretne