Strona 4
Elektronika przemysłowa
Pytanie 25
25. Transoptor liniowy:
poprzez wyjściową charakterystykę logarytmiczną linearyzuje wejściową charakterystykę wykładniczą diody
składa się z diody LED i fototranzystora
działa w oparciu o diodę LED oraz fotodiodę sprzężenia zwrotnego i fotodiodę wyjściową,
umożliwia bezpośrednią separację sygnałów stało- i zmiennoprądowych
Pytanie 26
26. Serwonapęd przeznaczony jest zwłaszcza do:
urządzeń o stałej prędkości obrotowej
napędów wentylatorów i pomp,
urządzeń automatyki o dużej dynamice ruchu,
pracy przerywanej,
Pytanie 27
27. Jakość pracy serwonapędu zwiększamy poprzez:
odpowiednie nastawy filtrów redukujących wpływ rezonansu mechanicznego,
nastawę parametrów - możliwie największe dla członu D w regulatorach prądów i dla członu I w regulatorze położenia,
zadawanie według krzywej „S”,
zwiększenie mocy rezystora hamowania do wartości większej od mocy silnika
Pytanie 28
28. W nowoczesnych obrabiarkach CNC stosujemy:
serwonapędy z regulatorami ze sprzężeniem w przód,
interpolację funkcjami sklejanymi,
serwonapędy z regulacją położenia, prędkości przyspieszenia i udaru,
interpolację wielomianami wysokiego rzędu.
Pytanie 29
29. Sieć komputerowa napędów sterowanych zazwyczaj zawiera:
interfejsy transmisji szeregowej RS232C,
specjalizowane interfejsy o szybkości transmisji rzędu 1Mbps.
interfejsy równoległe (np. 8 bitów - zwiększające szybkość transmisji),
Oprogramowanie umożliwiające sterowanie do kilku-tysięcy napędów,
Pytanie 30
30. W układach pomiaru położenia stosujemy optoelektroniczne przetworniki przyrostowe, gdyż:
w porównaniu z rezolwerami są odporne na drgania i udary,
nie są podatne na zakłócenia elektromagnetyczne (posiadają przetwornik optoelektroniczny, który jest odporny na zakłócenia)
mikrokontrolery posiadają odpowiednie interfejsy (liczniki),
multiplikacja sygnałów zwiększa dokładność pomiaru.
Pytanie 31
31. W układzie pomiaru położenia urządzenia technologicznego zastosowano przetworniki: absolutny i przyrostowy. Podczas ruchu urządzenia nastąpił zanik napięcia zasilającego enkodery. Jakie układy pomiarowe będą – po powrocie zasilania - prawidłowo wskazywały położenie:
tylko układ z enkoderem absolutnym,
oba układy z przetwornikiem absolutnym i przetwornikiem obrotowo-impulsowym
tylko układ z enkoderem przyrostowym,
żaden z układów.
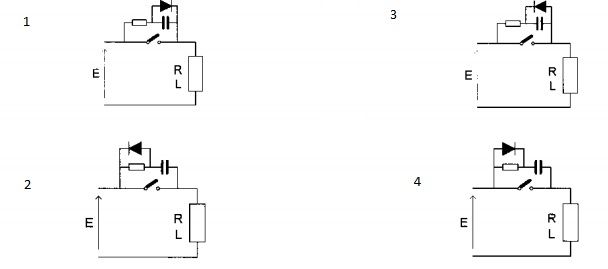
Pytanie 32
32. Który z układów charakteryzuje się największą skutecznością ochrony styku:
1
2
3
4